Toggle navigation
Hosted Weblate
Dashboard
Projects
Browse all projects
Languages
Browse all languages
Checks
Checks overview
Register
Sign in
Help
Get help
Contact
About Weblate
Documentation
Contribute to Weblate
Donate to Weblate
Klipper
G-Codes
Glossary
Screenshots
Screenshot 2021-06-21 at 11-33-24 KevinOConnor klipper-translations
Assigned source strings
English
Location
Assigned screenshots
Actions
`
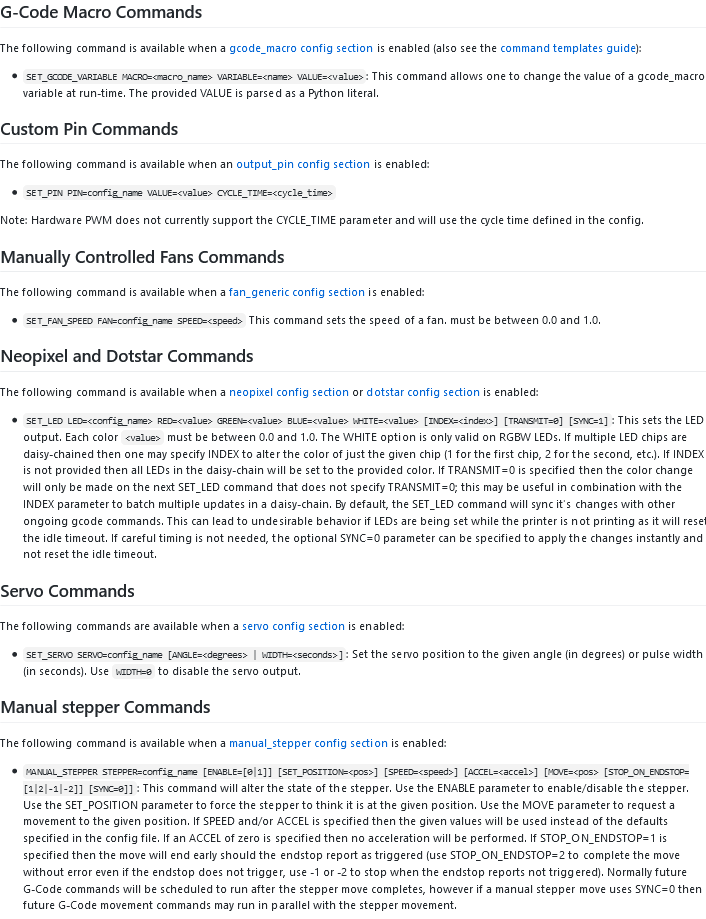
SET_GCODE_VARIABLE MACRO=<macro_name> VARIABLE=<name> VALUE=<value>
`
: This command allows one to change the value of a gcode_macro variable at run-time. The provided VALUE is parsed as a Python literal.
1
View
`
SET_SERVO SERVO=config_name [ANGLE=<degrees> | WIDTH=<seconds>]
`
: Set the servo position to the given angle (in degrees) or pulse width (in seconds). Use
`
WIDTH=0
`
to disable the servo output.
1
View
`
MANUAL_STEPPER STEPPER=config_name [ENABLE=[0|1]] [SET_POSITION=<pos>] [SPEED=<speed>] [ACCEL=<accel>] [MOVE=<pos> [STOP_ON_ENDSTOP=[1|2|-1|-2]] [SYNC=0]]
`
: This command will alter the state of the stepper. Use the ENABLE parameter to enable/disable the stepper. Use the SET_POSITION parameter to force the stepper to think it is at the given position. Use the MOVE parameter to request a movement to the given position. If SPEED and/or ACCEL is specified then the given values will be used instead of the defaults specified in the config file. If an ACCEL of zero is specified then no acceleration will be performed. If STOP_ON_ENDSTOP=1 is specified then the move will end early should the endstop report as triggered (use STOP_ON_ENDSTOP=2 to complete the move without error even if the endstop does not trigger, use -1 or -2 to stop when the endstop reports not triggered). Normally future G-Code commands will be scheduled to run after the stepper move completes, however if a manual stepper move uses SYNC=0 then future G-Code movement commands may run in parallel with the stepper movement.
1
View
Image
Screenshot details
Created
2 years ago
Uploaded by
dingyifei
Language
English
×
Close
 dingyifei
dingyifei